Simulating haptic material feedback for enhanced virtual reality immersion
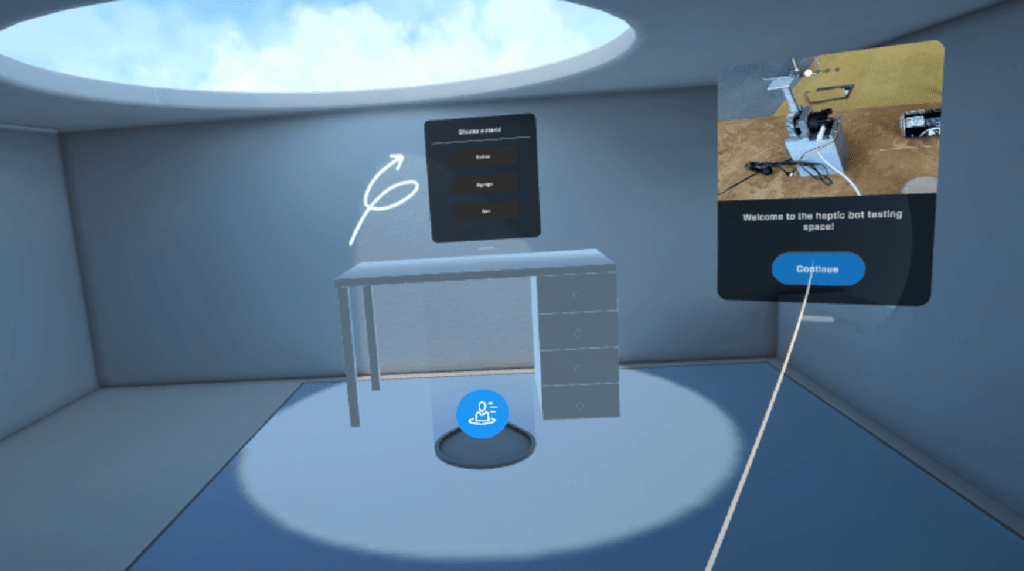
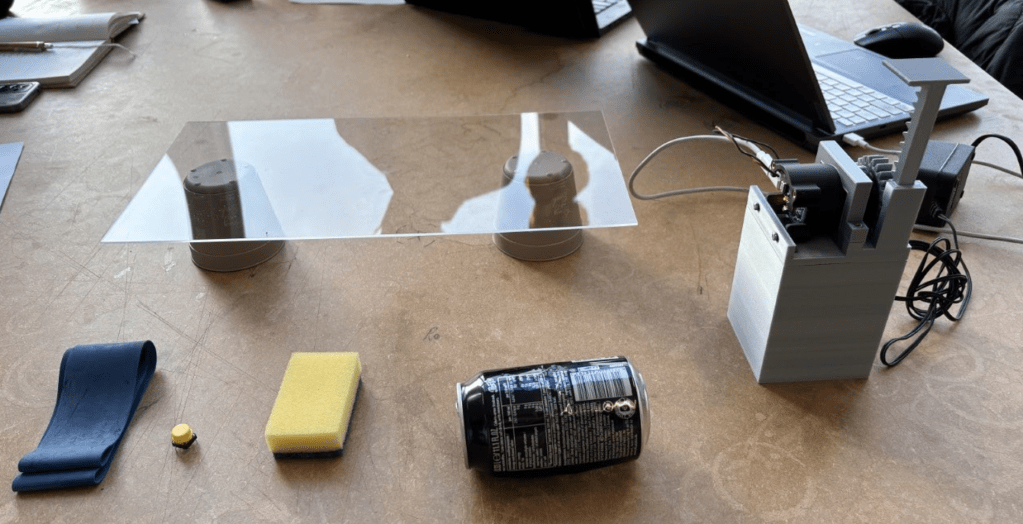
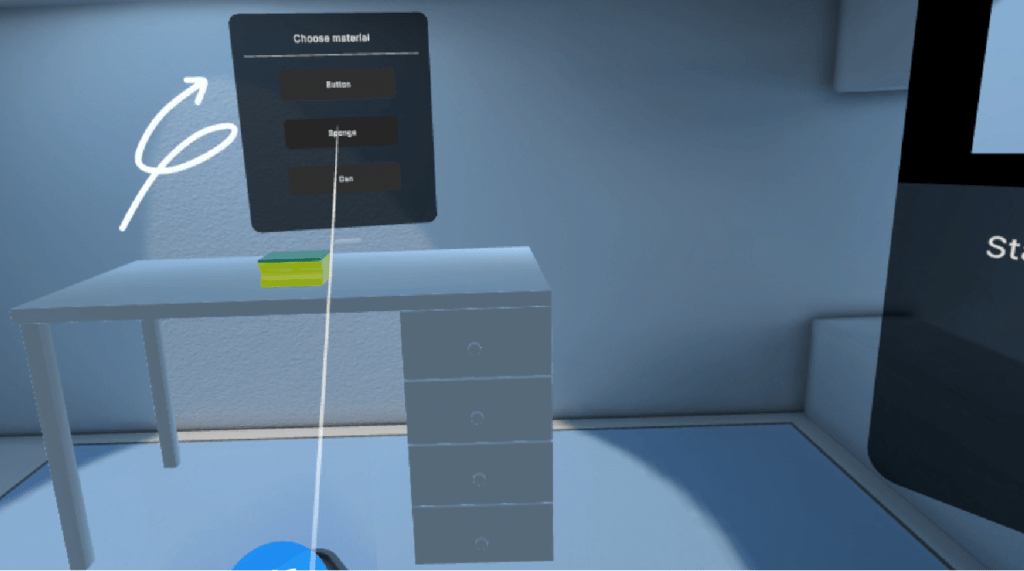
Haptic feedback has the potential to enhance immersion in virtual reality (VR) environments, yet the simulation of material sensations remains an underexplored area. This study researches how well robots can simulate an object’s material to enhance the immersive experience of VR. VTtact will not only give you the feeling you touch something in the VR environment but it also gives you the characteristic feeling of the object, such as the soft feeling of a sponge or the crisp feeling of a can. VRtact demonstrates the potential of motor-driven haptic feedback to improve VR experiences.


Team: Dominique Franken, Ariën Helder, Milou Henzen, Lisanne Verbeet, Fengyu Yu

You must be logged in to post a comment.